Various factors that minimize some Frobenius norm. More...
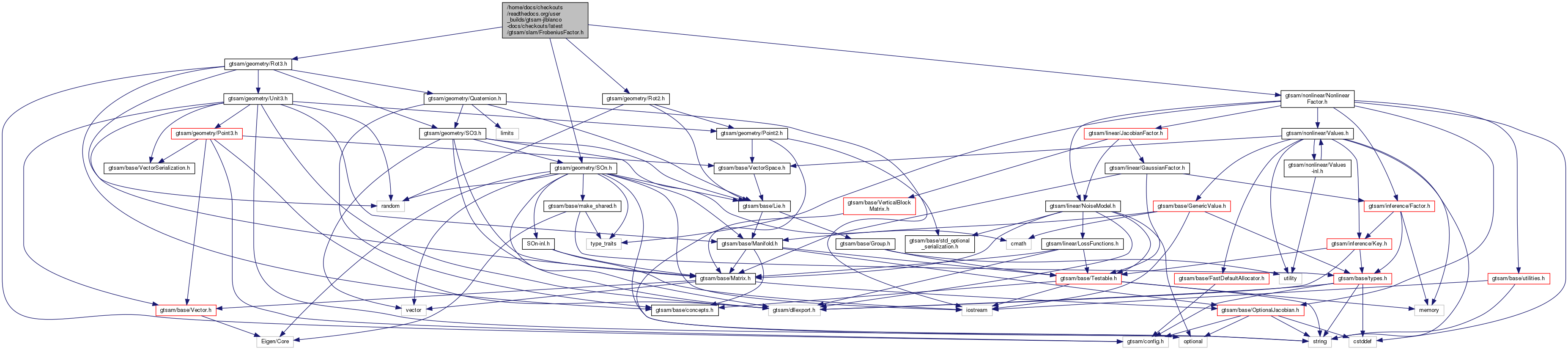
#include <gtsam/geometry/Rot2.h>#include <gtsam/geometry/Rot3.h>#include <gtsam/geometry/SOn.h>#include <gtsam/nonlinear/NonlinearFactor.h>
Include dependency graph for FrobeniusFactor.h:
Go to the source code of this file.
Classes | |
| class | gtsam::FrobeniusPrior< Rot > |
| class | gtsam::FrobeniusFactor< Rot > |
| class | gtsam::FrobeniusBetweenFactor< Rot > |
Namespaces | |
| gtsam | |
Functions | |
| GTSAM_EXPORT SharedNoiseModel | gtsam::ConvertNoiseModel (const SharedNoiseModel &model, size_t n, bool defaultToUnit=true) |
Detailed Description
Various factors that minimize some Frobenius norm.
- Date
- March 2019
