Contains the HessianFactor class, a general quadratic factor. More...
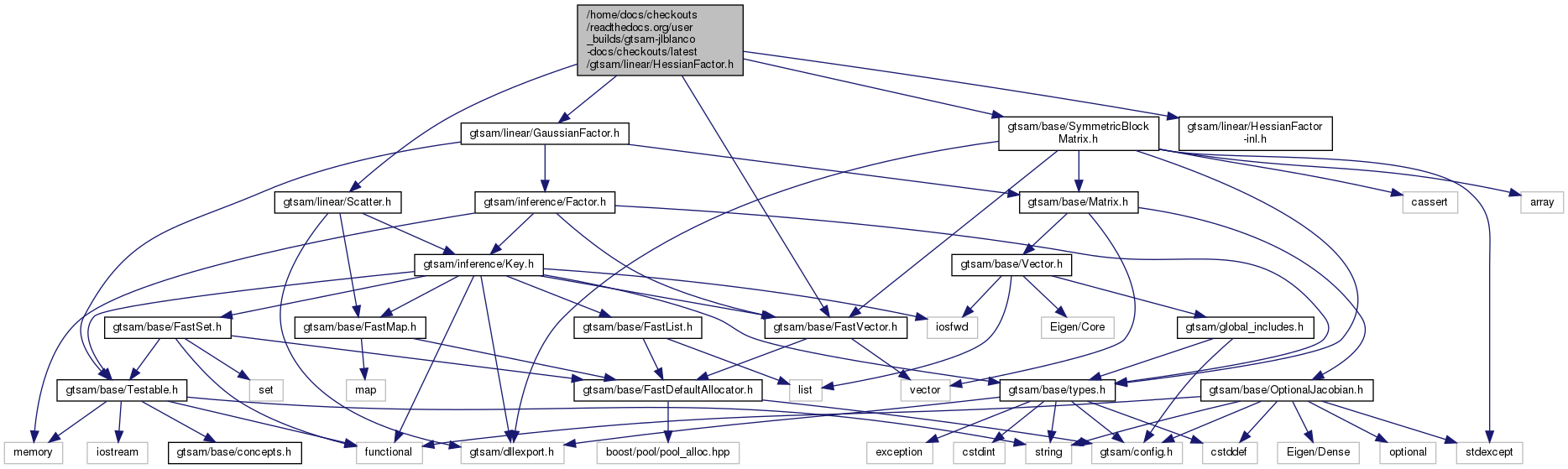
#include <gtsam/linear/GaussianFactor.h>#include <gtsam/linear/Scatter.h>#include <gtsam/base/SymmetricBlockMatrix.h>#include <gtsam/base/FastVector.h>#include <gtsam/linear/HessianFactor-inl.h>
Include dependency graph for HessianFactor.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | gtsam::HessianFactor |
| A Gaussian factor using the canonical parameters (information form) More... | |
| struct | gtsam::traits< HessianFactor > |
| traits More... | |
Namespaces | |
| gtsam | |
Functions | |
| GTSAM_EXPORT std::pair< std::shared_ptr< GaussianConditional >, std::shared_ptr< HessianFactor > > | gtsam::EliminateCholesky (const GaussianFactorGraph &factors, const Ordering &keys) |
| GTSAM_EXPORT std::pair< std::shared_ptr< GaussianConditional >, std::shared_ptr< GaussianFactor > > | gtsam::EliminatePreferCholesky (const GaussianFactorGraph &factors, const Ordering &keys) |
Detailed Description
Contains the HessianFactor class, a general quadratic factor.
- Date
- Dec 8, 2010
