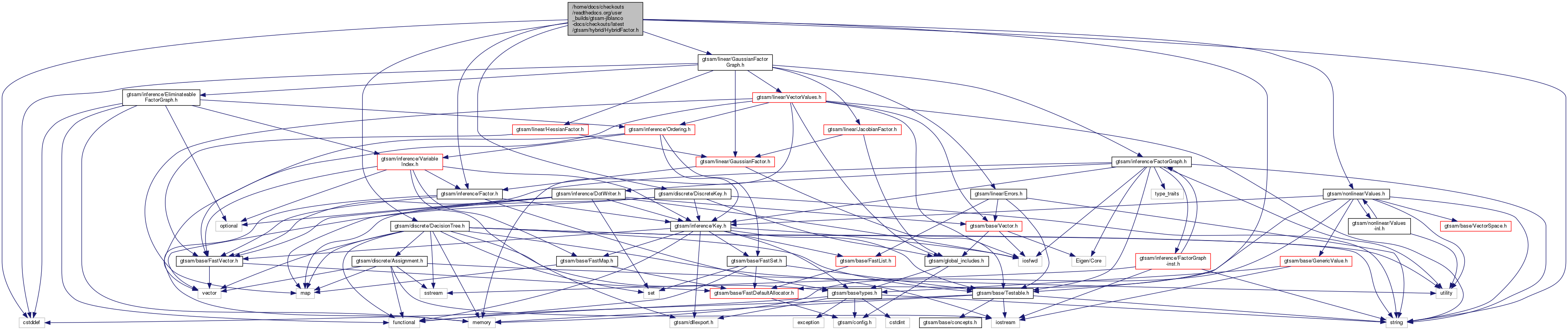
#include <gtsam/base/Testable.h>#include <gtsam/discrete/DecisionTree.h>#include <gtsam/discrete/DiscreteKey.h>#include <gtsam/inference/Factor.h>#include <gtsam/linear/GaussianFactorGraph.h>#include <gtsam/nonlinear/Values.h>#include <cstddef>#include <string>
Include dependency graph for HybridFactor.h:
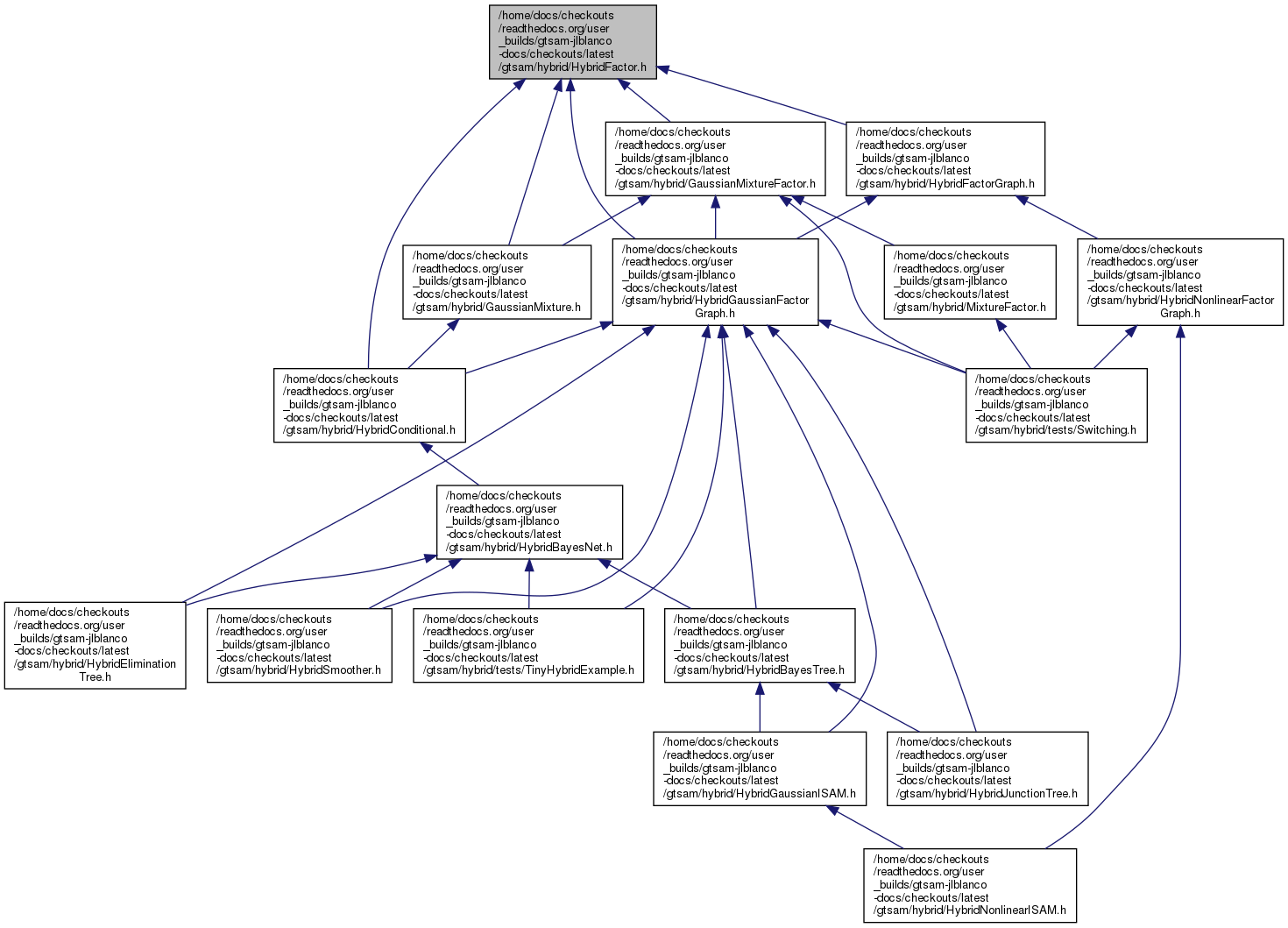
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::HybridFactor |
| struct | gtsam::traits< HybridFactor > |
Namespaces | |
| gtsam | |
Typedefs | |
| using | gtsam::GaussianFactorGraphTree = DecisionTree< Key, GaussianFactorGraph > |
| Alias for DecisionTree of GaussianFactorGraphs. | |
Detailed Description
- Date
- Mar 11, 2022
