An incremental smoother for hybrid factor graphs. More...
#include <gtsam/discrete/DiscreteFactorGraph.h>#include <gtsam/hybrid/HybridBayesNet.h>#include <gtsam/hybrid/HybridGaussianFactorGraph.h>#include <optional>
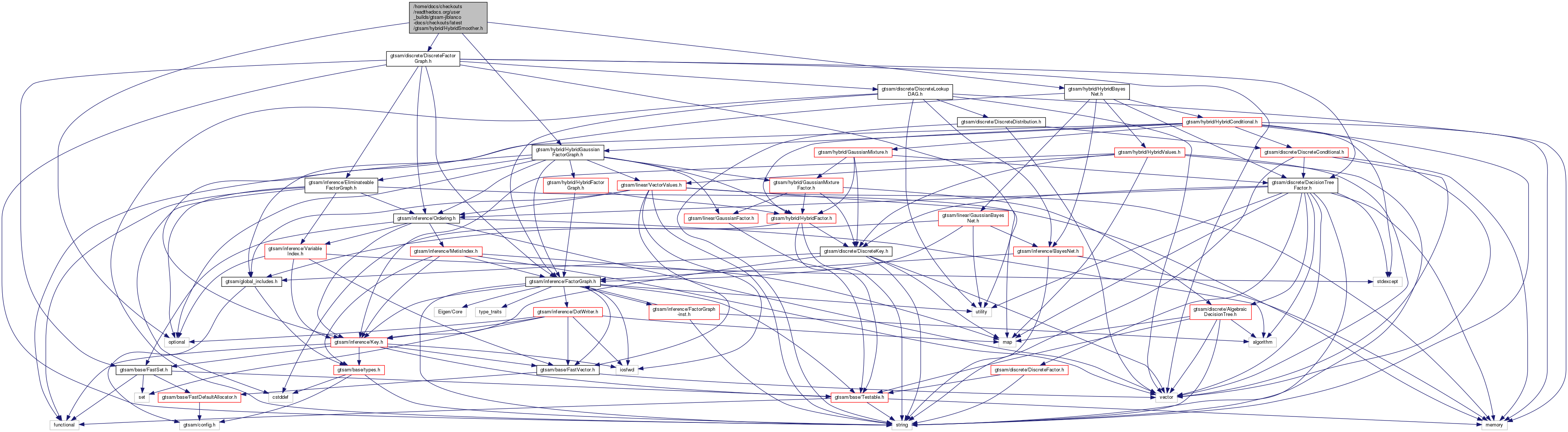
Include dependency graph for HybridSmoother.h:
Go to the source code of this file.
Classes | |
| class | gtsam::HybridSmoother |
Namespaces | |
| gtsam | |
Detailed Description
An incremental smoother for hybrid factor graphs.
- Date
- October 2022
