Factor to express an IMU measurement between dynamic poses. More...
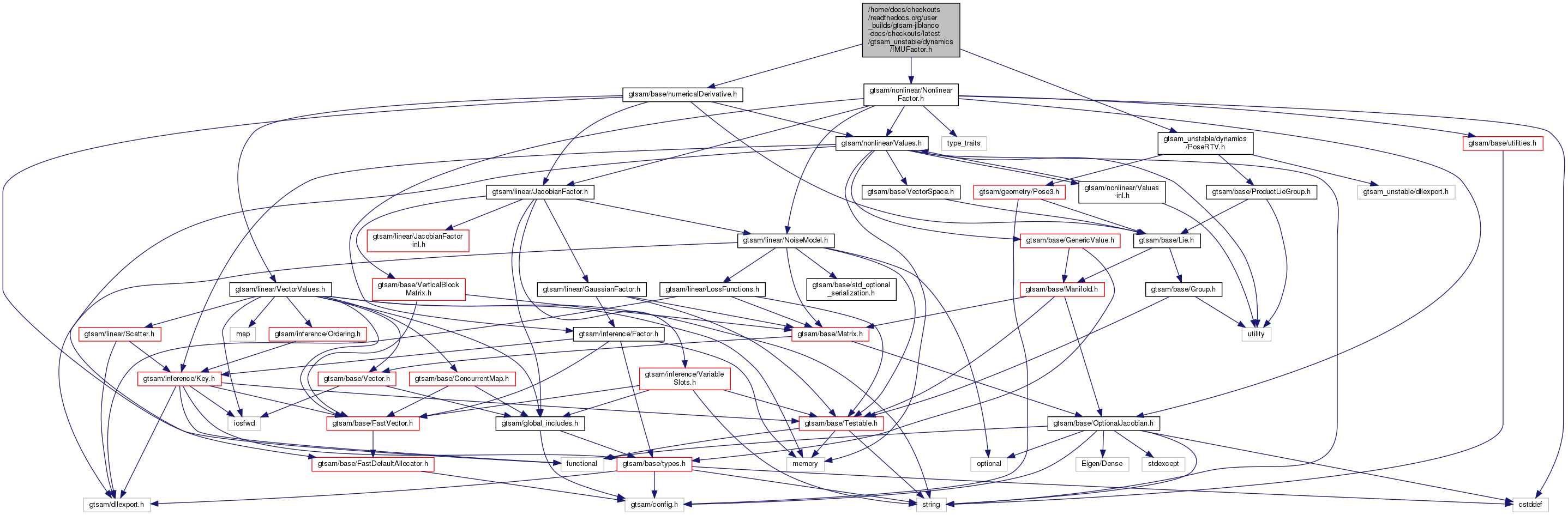
#include <gtsam/base/numericalDerivative.h>#include <gtsam/nonlinear/NonlinearFactor.h>#include <gtsam_unstable/dynamics/PoseRTV.h>
Include dependency graph for IMUFactor.h:
Go to the source code of this file.
Classes | |
| class | gtsam::IMUFactor< POSE > |
Namespaces | |
| gtsam | |
Detailed Description
Factor to express an IMU measurement between dynamic poses.
