Initialize Pose3 in a factor graph. More...
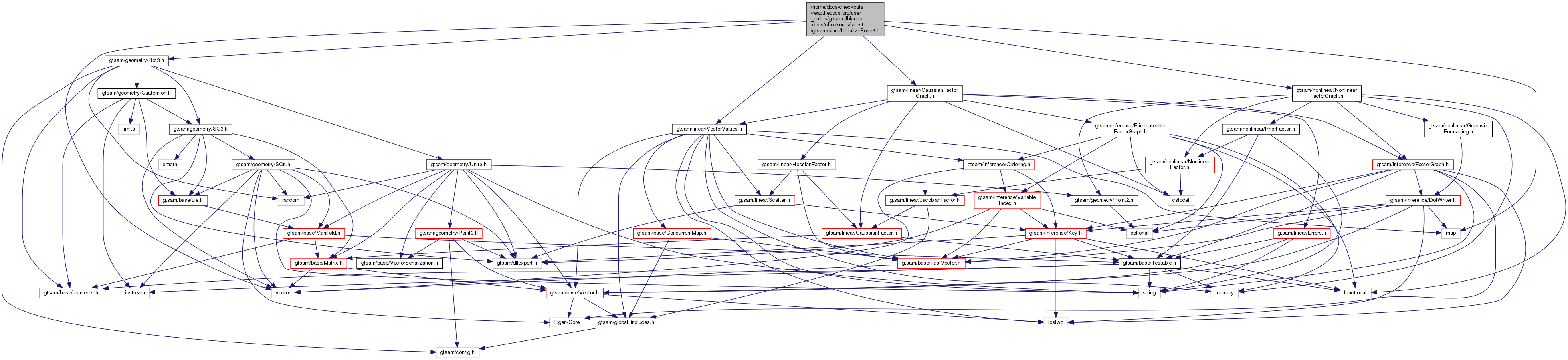
#include <gtsam/geometry/Rot3.h>#include <gtsam/linear/GaussianFactorGraph.h>#include <gtsam/linear/VectorValues.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <map>#include <vector>
Include dependency graph for InitializePose3.h:
Go to the source code of this file.
Classes | |
| struct | gtsam::InitializePose3 |
Namespaces | |
| gtsam | |
Typedefs | |
| typedef std::map< Key, std::vector< size_t > > | gtsam::KeyVectorMap |
| typedef std::map< Key, Rot3 > | gtsam::KeyRotMap |
Detailed Description
Initialize Pose3 in a factor graph.
- Date
- August, 2014
