A simple prior factor that allows for setting a prior only on a part of linear parameters. More...
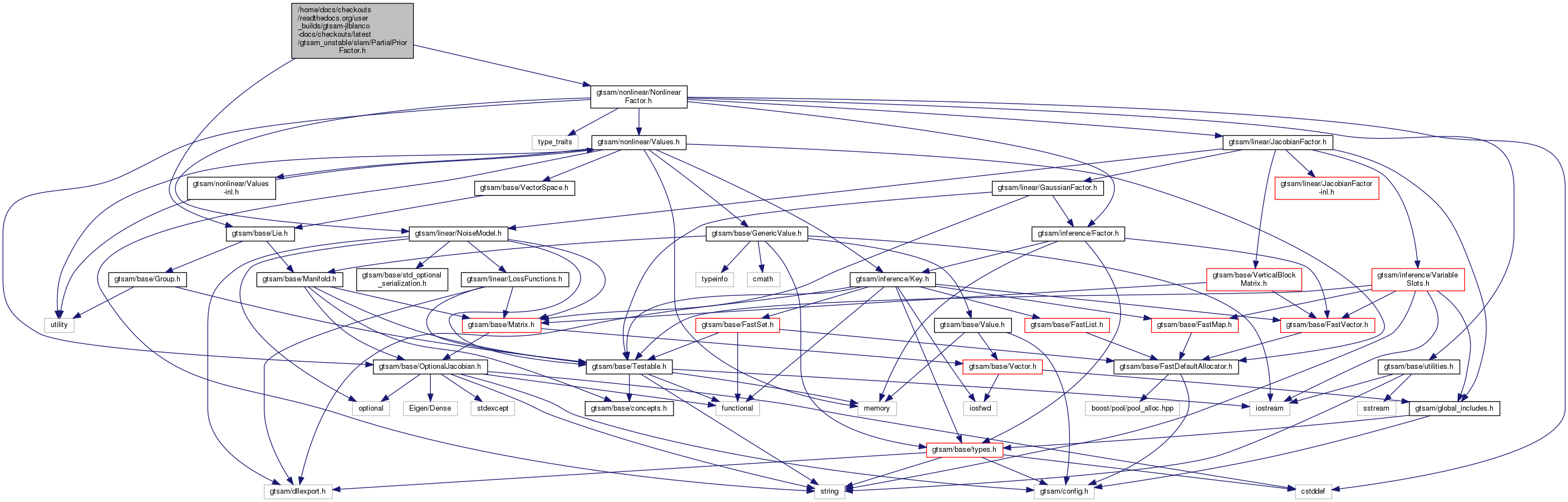
Include dependency graph for PartialPriorFactor.h:
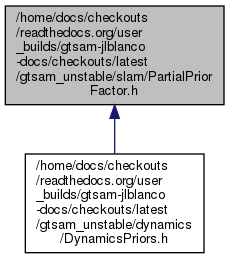
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::PartialPriorFactor< VALUE > |
Namespaces | |
| gtsam | |
Detailed Description
A simple prior factor that allows for setting a prior only on a part of linear parameters.
