Derived from ProjectionFactor, but estimates body-camera transform in addition to body pose and 3D landmark. More...
#include <gtsam/nonlinear/NonlinearFactor.h>#include <gtsam/geometry/PinholeCamera.h>#include <gtsam/geometry/Cal3_S2.h>
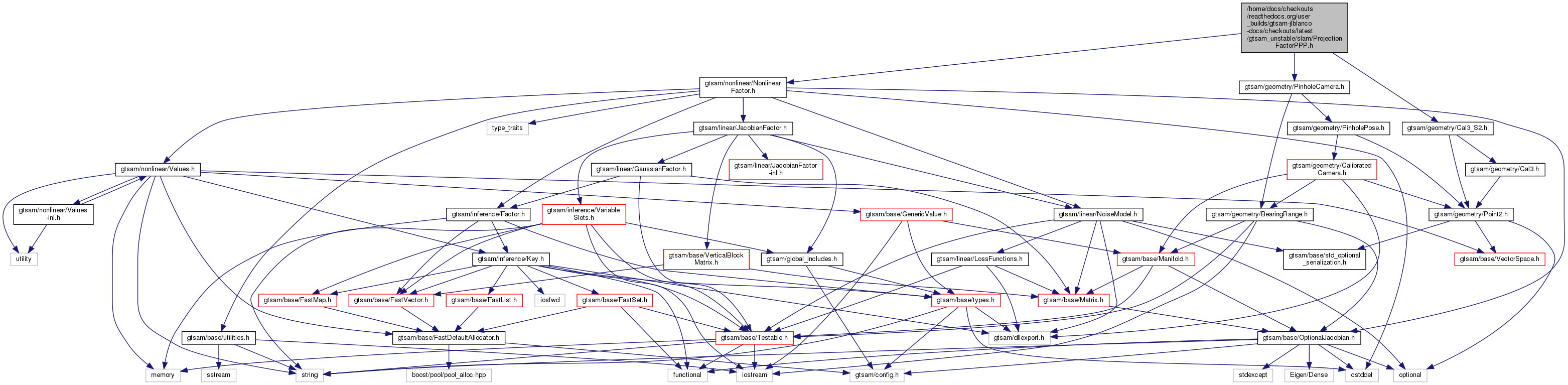
Include dependency graph for ProjectionFactorPPP.h:
Go to the source code of this file.
Classes | |
| class | gtsam::ProjectionFactorPPP< POSE, LANDMARK, CALIBRATION > |
| struct | gtsam::traits< ProjectionFactorPPP< POSE, LANDMARK, CALIBRATION > > |
| traits More... | |
Namespaces | |
| gtsam | |
Detailed Description
Derived from ProjectionFactor, but estimates body-camera transform in addition to body pose and 3D landmark.
