Fit a Basis using least-squares. More...
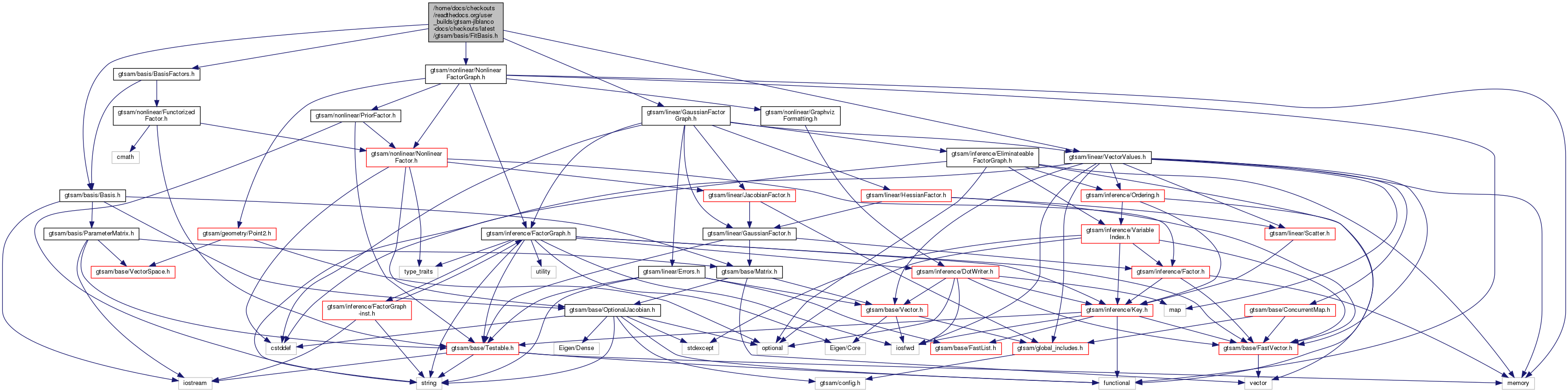
#include <gtsam/basis/Basis.h>#include <gtsam/basis/BasisFactors.h>#include <gtsam/linear/GaussianFactorGraph.h>#include <gtsam/linear/VectorValues.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>
Include dependency graph for FitBasis.h:
Go to the source code of this file.
Classes | |
| class | gtsam::FitBasis< Basis > |
Namespaces | |
| gtsam | |
Typedefs | |
| using | gtsam::Sequence = std::map< double, double > |
| Our sequence representation is a map of {x: y} values where y = f(x) | |
| using | gtsam::Sample = std::pair< double, double > |
| A sample is a key-value pair from a sequence. | |
Detailed Description
Fit a Basis using least-squares.
- Date
- July 4, 2020
