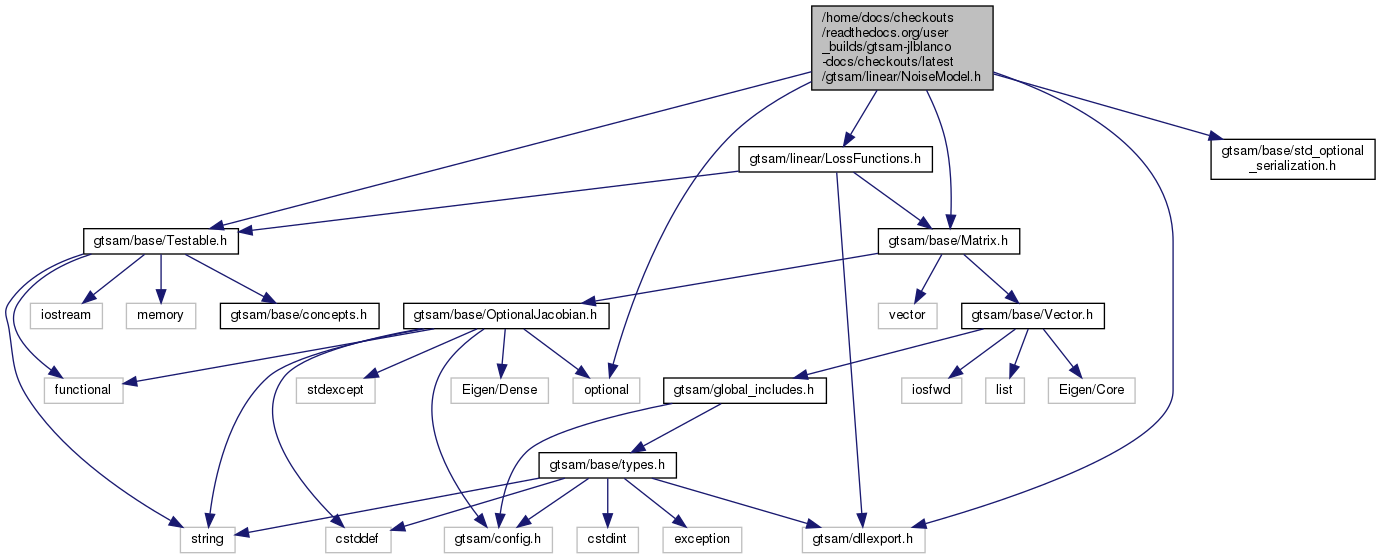
#include <gtsam/base/Testable.h>
#include <gtsam/base/Matrix.h>
#include <gtsam/base/std_optional_serialization.h>
#include <gtsam/dllexport.h>
#include <gtsam/linear/LossFunctions.h>
#include <optional>
Go to the source code of this file.
|
| typedef noiseModel::Base::shared_ptr | gtsam::SharedNoiseModel |
| |
|
typedef noiseModel::Gaussian::shared_ptr | gtsam::SharedGaussian |
| |
|
typedef noiseModel::Diagonal::shared_ptr | gtsam::SharedDiagonal |
| |
|
typedef noiseModel::Constrained::shared_ptr | gtsam::SharedConstrained |
| |
|
typedef noiseModel::Isotropic::shared_ptr | gtsam::SharedIsotropic |
| |
|
|
GTSAM_EXPORT std::optional< Vector > | gtsam::noiseModel::checkIfDiagonal (const Matrix &M) |
| |
- Date
- Jan 13, 2010
- Author
- Richard Roberts
-
Frank Dellaert