Variation of a Pose3 in which the rotation is constained to purely yaw This state is essentially a Pose2 with a z component, with conversions to higher and lower dimensional states. More...
#include <gtsam_unstable/dllexport.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/geometry/Pose2.h>
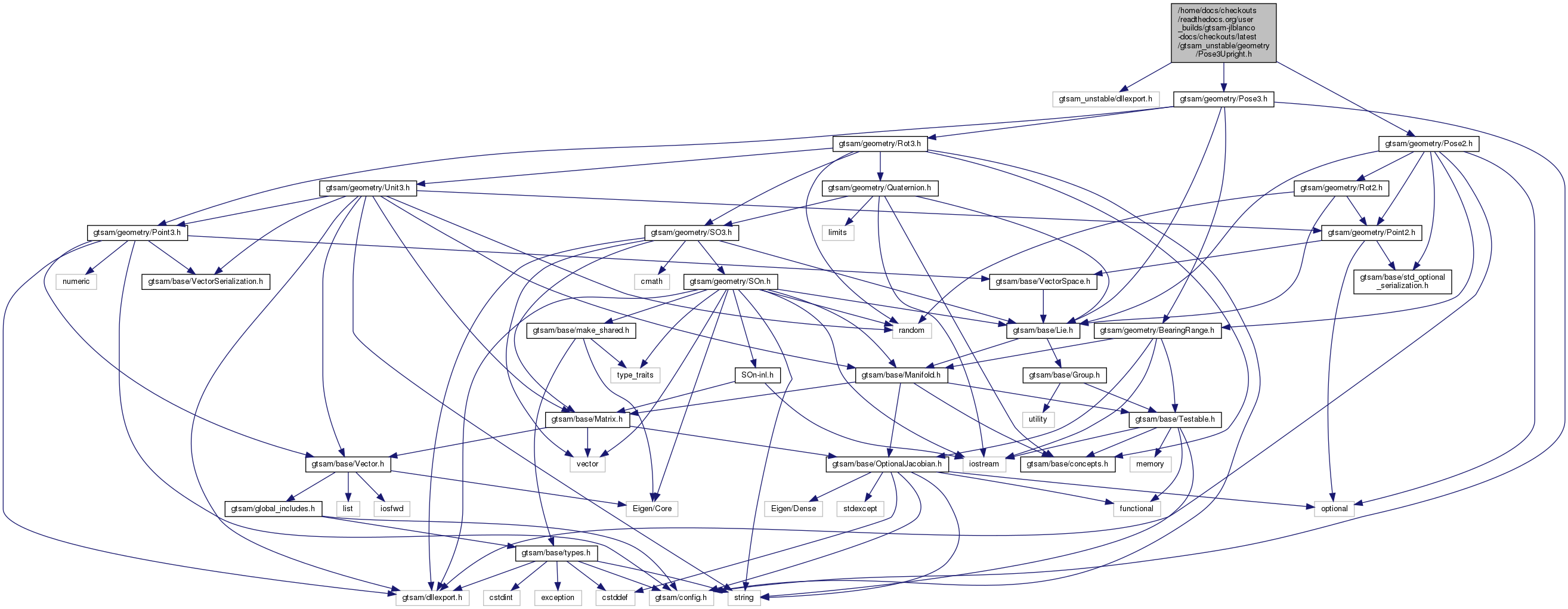
Include dependency graph for Pose3Upright.h:
Go to the source code of this file.
Classes | |
| class | gtsam::Pose3Upright |
| struct | gtsam::traits< Pose3Upright > |
Namespaces | |
| gtsam | |
Detailed Description
Variation of a Pose3 in which the rotation is constained to purely yaw This state is essentially a Pose2 with a z component, with conversions to higher and lower dimensional states.
- Date
- Jan 24, 2012
