Collect common parameters for SmartProjection and SmartStereoProjection factors. More...
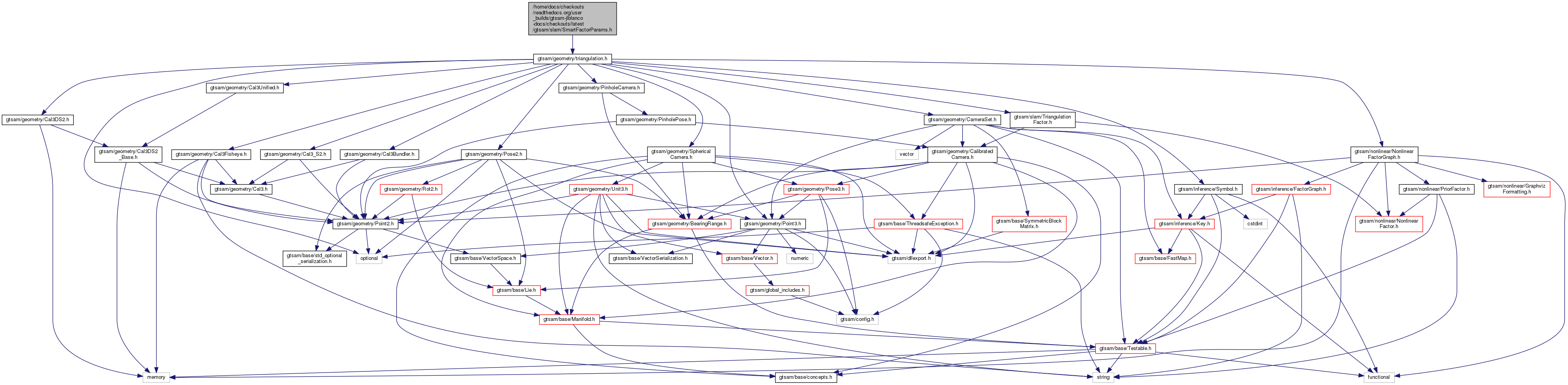
#include <gtsam/geometry/triangulation.h>
Include dependency graph for SmartFactorParams.h:
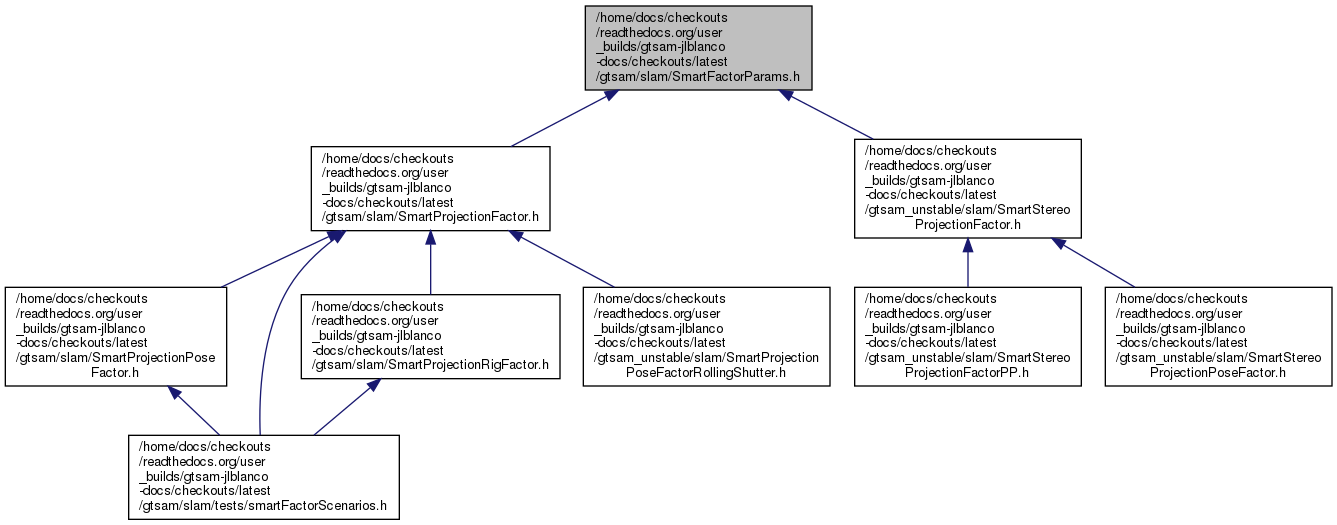
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | gtsam::SmartProjectionParams |
Namespaces | |
| gtsam | |
Enumerations | |
| enum | gtsam::LinearizationMode { HESSIAN, IMPLICIT_SCHUR, JACOBIAN_Q, JACOBIAN_SVD } |
| Linearization mode: what factor to linearize to. More... | |
| enum | gtsam::DegeneracyMode { IGNORE_DEGENERACY, ZERO_ON_DEGENERACY, HANDLE_INFINITY } |
| How to manage degeneracy. | |
Detailed Description
Collect common parameters for SmartProjection and SmartStereoProjection factors.
