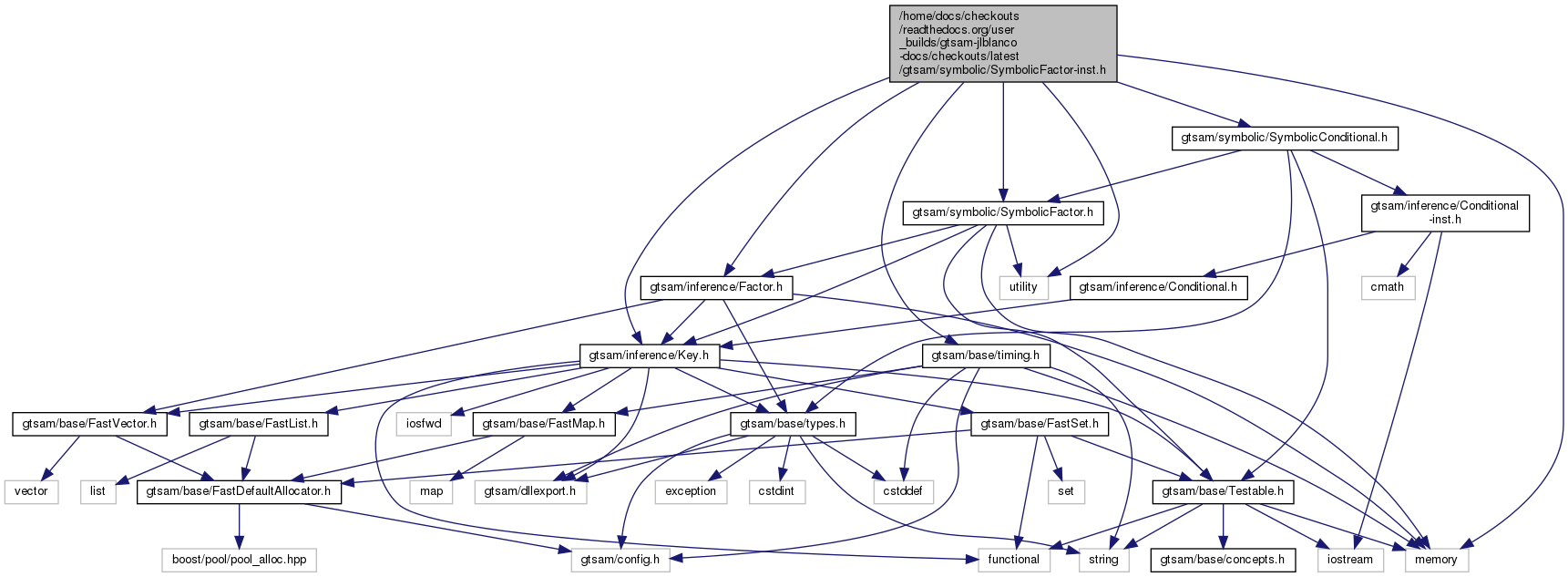
#include <gtsam/symbolic/SymbolicFactor.h>#include <gtsam/symbolic/SymbolicConditional.h>#include <gtsam/inference/Factor.h>#include <gtsam/inference/Key.h>#include <gtsam/base/timing.h>#include <memory>#include <utility>
Include dependency graph for SymbolicFactor-inst.h:
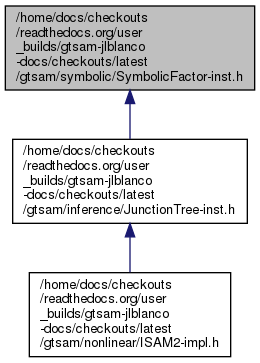
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| gtsam | |
Functions | |
| template<class FACTOR > | |
| std::pair< std::shared_ptr< SymbolicConditional >, std::shared_ptr< SymbolicFactor > > | gtsam::internal::EliminateSymbolic (const FactorGraph< FACTOR > &factors, const Ordering &keys) |
Detailed Description
- Date
- Oct 17, 2010
Function Documentation
◆ EliminateSymbolic()
template<class FACTOR >
| std::pair<std::shared_ptr<SymbolicConditional>, std::shared_ptr<SymbolicFactor> > gtsam::internal::EliminateSymbolic | ( | const FactorGraph< FACTOR > & | factors, |
| const Ordering & | keys | ||
| ) |
Implementation of dense elimination function for symbolic factors. This is a templated version for internally doing symbolic elimination on any factor.
