Constraint enforcing the relationship between pose and velocity. More...
#include <gtsam/base/numericalDerivative.h>#include <gtsam/nonlinear/NonlinearFactor.h>#include <gtsam_unstable/dynamics/PoseRTV.h>
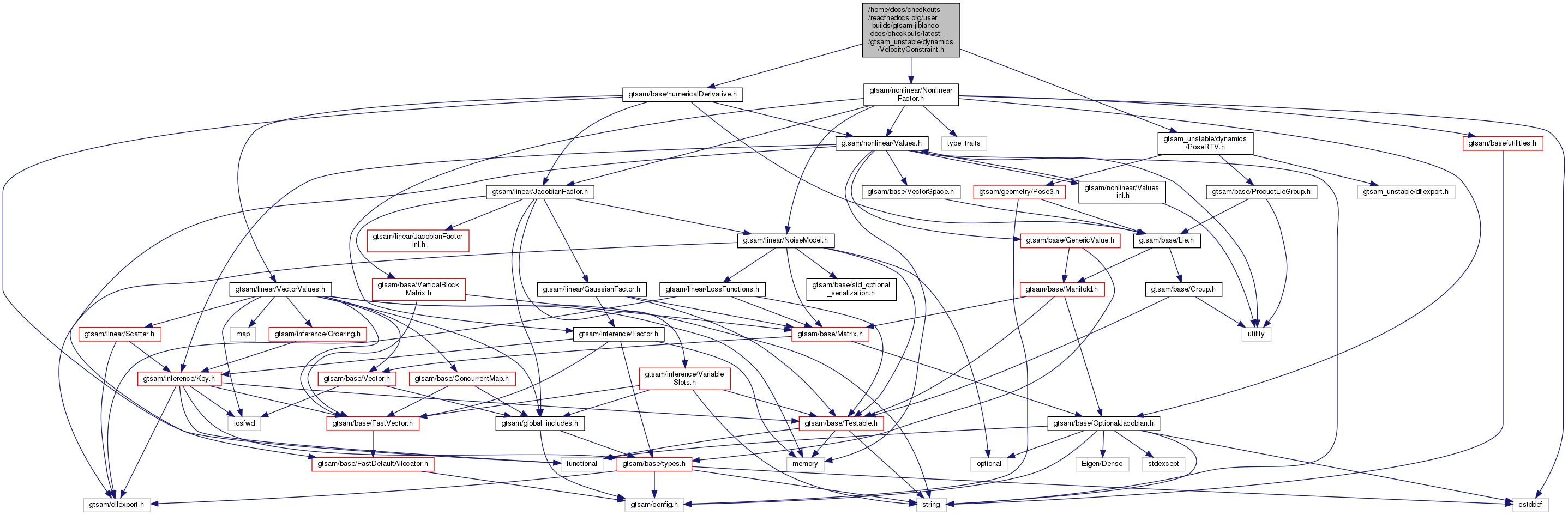
Include dependency graph for VelocityConstraint.h:
Go to the source code of this file.
Classes | |
| class | gtsam::VelocityConstraint |
Namespaces | |
| gtsam | |
Enumerations | |
| enum | gtsam::dynamics::IntegrationMode { TRAPEZOIDAL, EULER_START, EULER_END } |
Detailed Description
Constraint enforcing the relationship between pose and velocity.
Enumeration Type Documentation
◆ IntegrationMode
controls which model to use for numerical integration to use for constraints
