Contains generic inference algorithms that convert between templated graphical models, i.e., factor graphs, Bayes nets, and Bayes trees. More...
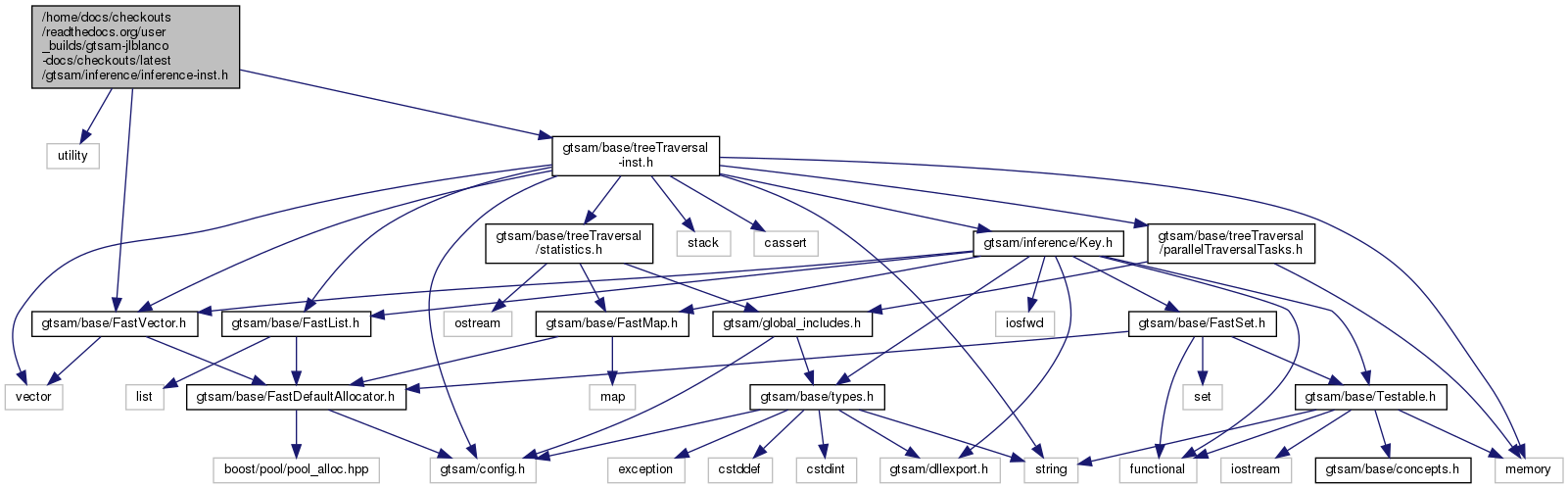
Include dependency graph for inference-inst.h:
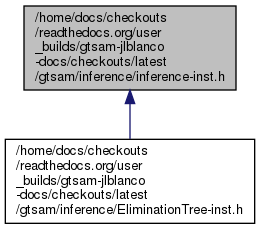
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| gtsam | |
Functions | |
| template<class TREE , class RESULT > | |
| FastVector< typename TREE::sharedFactor > | gtsam::inference::EliminateTree (RESULT &result, const TREE &tree, const typename TREE::Eliminate &function) |
Detailed Description
Contains generic inference algorithms that convert between templated graphical models, i.e., factor graphs, Bayes nets, and Bayes trees.
Function Documentation
◆ EliminateTree()
template<class TREE , class RESULT >
| FastVector<typename TREE::sharedFactor> gtsam::inference::EliminateTree | ( | RESULT & | result, |
| const TREE & | tree, | ||
| const typename TREE::Eliminate & | function | ||
| ) |
Eliminate an elimination tree or a Bayes tree (used internally). Requires TREE::BayesNetType, TREE::FactorGraphType, TREE::sharedConditional, TREE::sharedFactor, TREE::Node, TREE::sharedNode, TREE::Node::factors, TREE::Node::children.
