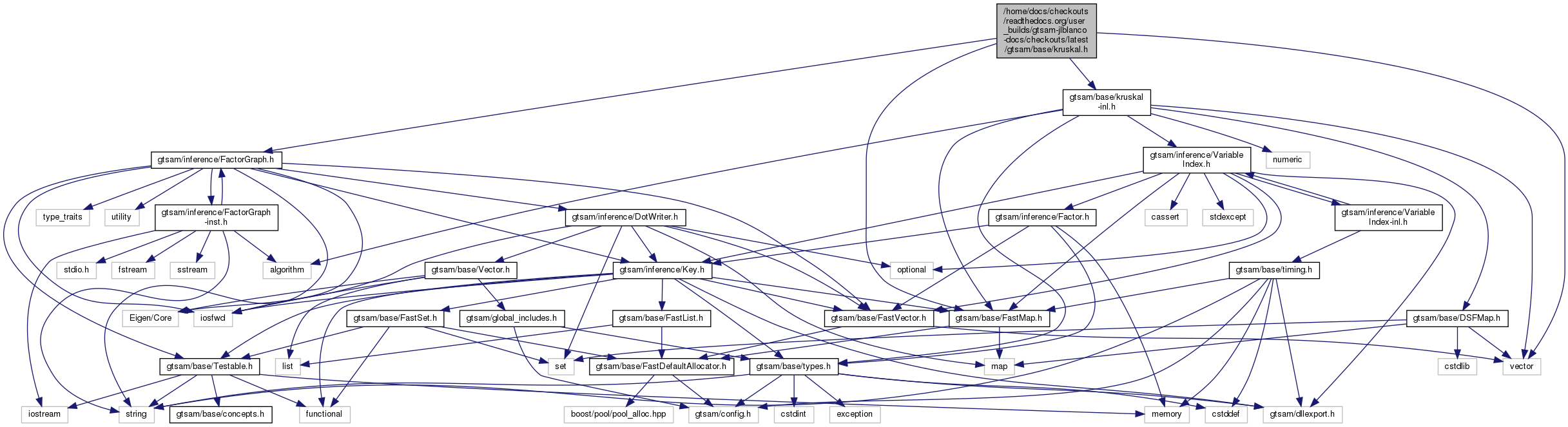
#include <gtsam/base/FastMap.h>#include <gtsam/inference/FactorGraph.h>#include <vector>#include <gtsam/base/kruskal-inl.h>
Include dependency graph for kruskal.h:
Go to the source code of this file.
Functions | |
| template<class FACTOR > | |
| std::vector< size_t > | gtsam::utils::kruskal (const FactorGraph< FACTOR > &fg, const std::vector< double > &weights) |
Detailed Description
- Date
- Dec 31, 2009
Function Documentation
◆ kruskal()
template<class FACTOR >
| std::vector< size_t > gtsam::utils::kruskal | ( | const FactorGraph< FACTOR > & | fg, |
| const std::vector< double > & | weights | ||
| ) |
Compute the minimum spanning tree (MST) using Kruskal's algorithm
- Parameters
-
fg Factor graph weights Weights of the edges/factors in the factor graph
- Returns
- Edge/factor indices spanning the MST
- Note
- Only binary factors are considered while constructing the spanning tree
- The indices of 'weights' should match the indices of the edges in the factor graph
