Identifies connected components in the keypoint matches graph. More...
#include <gtsam/base/DSFMap.h>#include <gtsam/sfm/SfmTrack.h>#include <Eigen/Core>#include <map>#include <optional>#include <vector>
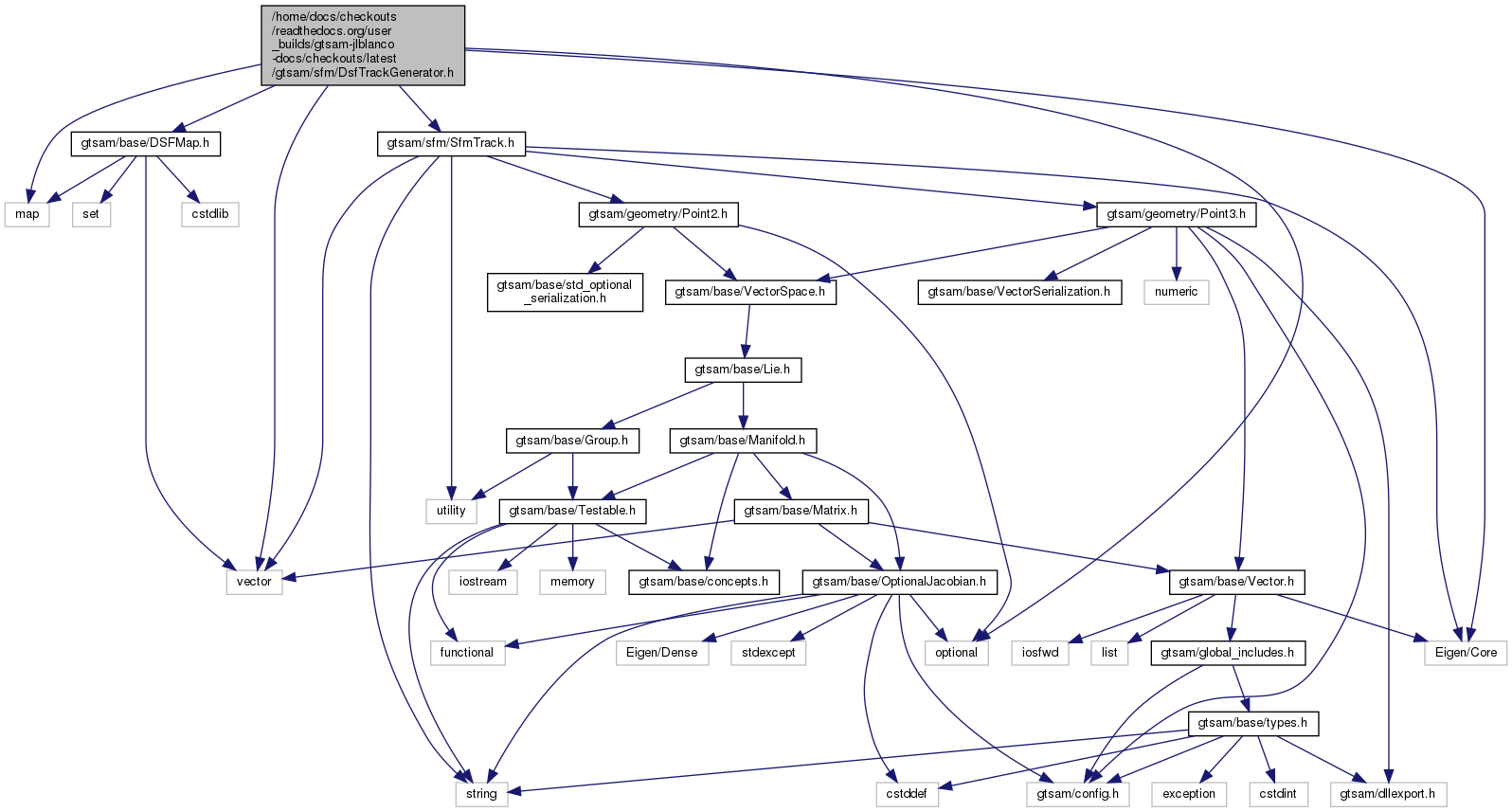
Include dependency graph for DsfTrackGenerator.h:
Go to the source code of this file.
Classes | |
| struct | gtsam::gtsfm::Keypoints |
Namespaces | |
| gtsam | |
Functions | |
| std::vector< SfmTrack2d > | gtsam::gtsfm::tracksFromPairwiseMatches (const MatchIndicesMap &matches, const KeypointsVector &keypoints, bool verbose=false) |
| Creates a list of tracks from 2d point correspondences. More... | |
Detailed Description
Identifies connected components in the keypoint matches graph.
- Date
- July 2022
Function Documentation
◆ tracksFromPairwiseMatches()
| std::vector<SfmTrack2d> gtsam::gtsfm::tracksFromPairwiseMatches | ( | const MatchIndicesMap & | matches, |
| const KeypointsVector & | keypoints, | ||
| bool | verbose = false |
||
| ) |
Creates a list of tracks from 2d point correspondences.
Creates a disjoint-set forest (DSF) and 2d tracks from pairwise matches. We create a singleton for union-find set elements from camera index of a detection and the index of that detection in that camera's keypoint list, i.e. (i,k).
- Parameters
-
Map from (i1,i2) image pair indices to (K,2) matrix, for K correspondence indices, from each image. Length-N list of keypoints, for N images/cameras.
