|
|
typedef std::shared_ptr< FixedLagSmoother > | shared_ptr |
| | Typedef for a shared pointer to an Incremental Fixed-Lag Smoother.
|
| |
|
typedef std::map< Key, double > | KeyTimestampMap |
| | Typedef for a Key-Timestamp map/database.
|
| |
|
typedef std::multimap< double, Key > | TimestampKeyMap |
| |
◆ FixedLagSmoother()
| gtsam::FixedLagSmoother::FixedLagSmoother |
( |
double |
smootherLag = 0.0 | ) |
|
|
inline |
◆ ~FixedLagSmoother()
| virtual gtsam::FixedLagSmoother::~FixedLagSmoother |
( |
| ) |
|
|
inlinevirtual |
◆ calculateEstimate()
| virtual Values gtsam::FixedLagSmoother::calculateEstimate |
( |
| ) |
const |
|
pure virtual |
Compute an estimate from the incomplete linear delta computed during the last update. This delta is incomplete because it was not updated below wildfire_threshold. If only a single variable is needed, it is faster to call calculateEstimate(const KEY&).
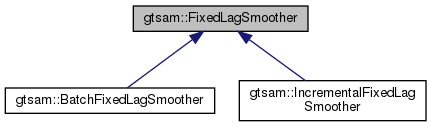
Implemented in gtsam::IncrementalFixedLagSmoother, and gtsam::BatchFixedLagSmoother.
◆ equals()
| virtual bool gtsam::FixedLagSmoother::equals |
( |
const FixedLagSmoother & |
rhs, |
|
|
double |
tol = 1e-9 |
|
) |
| const |
|
virtual |
◆ eraseKeyTimestampMap()
| void gtsam::FixedLagSmoother::eraseKeyTimestampMap |
( |
const KeyVector & |
keys | ) |
|
|
protected |
Erase keys from the Key-Timestamps database
◆ findKeysAfter()
| KeyVector gtsam::FixedLagSmoother::findKeysAfter |
( |
double |
timestamp | ) |
const |
|
protected |
Find all of the keys associated with timestamps before the provided time
◆ findKeysBefore()
| KeyVector gtsam::FixedLagSmoother::findKeysBefore |
( |
double |
timestamp | ) |
const |
|
protected |
Find all of the keys associated with timestamps before the provided time
◆ getCurrentTimestamp()
| double gtsam::FixedLagSmoother::getCurrentTimestamp |
( |
| ) |
const |
|
protected |
Find the most recent timestamp of the system
◆ print()
| virtual void gtsam::FixedLagSmoother::print |
( |
| ) |
|
|
virtual |
◆ smootherLag() [1/2]
| double gtsam::FixedLagSmoother::smootherLag |
( |
| ) |
const |
|
inline |
read the current smoother lag
◆ smootherLag() [2/2]
| double& gtsam::FixedLagSmoother::smootherLag |
( |
| ) |
|
|
inline |
write to the current smoother lag
◆ timestamps()
Access the current set of timestamps associated with each variable
◆ update()
◆ updateKeyTimestampMap()
| void gtsam::FixedLagSmoother::updateKeyTimestampMap |
( |
const KeyTimestampMap & |
newTimestamps | ) |
|
|
protected |
Update the Timestamps associated with the keys
◆ smootherLag_
| double gtsam::FixedLagSmoother::smootherLag_ |
|
protected |
The length of the smoother lag. Any variable older than this amount will be marginalized out.
◆ timestampKeyMap_
| TimestampKeyMap gtsam::FixedLagSmoother::timestampKeyMap_ |
|
protected |
The current timestamp associated with each tracked key
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/gtsam-jlblanco-docs/checkouts/latest/gtsam_unstable/nonlinear/FixedLagSmoother.h