#include <LinearizedFactor.h>
Public Types | |
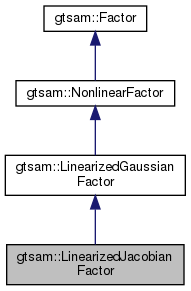
| typedef LinearizedGaussianFactor | Base |
| typedef LinearizedJacobianFactor | This |
| typedef std::shared_ptr< LinearizedJacobianFactor > | shared_ptr |
| typedef VerticalBlockMatrix::Block | ABlock |
| typedef VerticalBlockMatrix::constBlock | constABlock |
| typedef VerticalBlockMatrix::Block::ColXpr | BVector |
| typedef VerticalBlockMatrix::constBlock::ConstColXpr | constBVector |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. | |
Public Member Functions | |
| LinearizedJacobianFactor () | |
| LinearizedJacobianFactor (const JacobianFactor::shared_ptr &jacobian, const Values &lin_points) | |
| gtsam::NonlinearFactor::shared_ptr | clone () const override |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| bool | equals (const NonlinearFactor &expected, double tol=1e-9) const override |
| const constBVector | b () const |
| const constABlock | A () const |
| const constABlock | A (Key key) const |
| size_t | dim () const override |
| double | error (const Values &c) const override |
| std::shared_ptr< GaussianFactor > | linearize (const Values &c) const override |
| Vector | error_vector (const Values &c) const |
| const Values & | linearizationPoint () const |
Testable | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality | |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys | |
Standard Interface | |
| double | error (const HybridValues &c) const override |
| virtual bool | active (const Values &) const |
| virtual shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| virtual shared_ptr | rekey (const KeyVector &new_keys) const |
| virtual bool | sendable () const |
Standard Interface | |
| bool | empty () const |
| Whether the factor is empty (involves zero variables). | |
| Key | front () const |
| First key. | |
| Key | back () const |
| Last key. | |
| const_iterator | find (Key key) const |
| find | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
Advanced Interface | |
| KeyVector & | keys () |
| iterator | begin () |
| iterator | end () |
Static Protected Member Functions | |
Standard Constructors | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
Protected Attributes | |
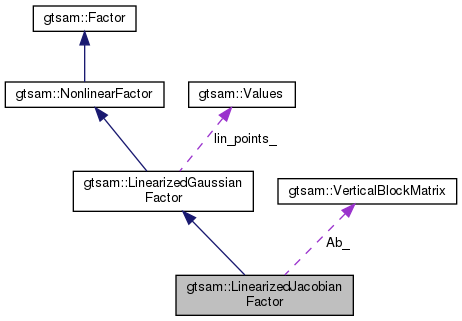
| VerticalBlockMatrix | Ab_ |
| Values | lin_points_ |
| KeyVector | keys_ |
| The keys involved in this factor. | |
Detailed Description
A factor that takes a linear, Jacobian factor and inserts it into a nonlinear graph.
Member Typedef Documentation
◆ Base
base type
◆ shared_ptr
| typedef std::shared_ptr<LinearizedJacobianFactor> gtsam::LinearizedJacobianFactor::shared_ptr |
shared pointer for convenience
Constructor & Destructor Documentation
◆ LinearizedJacobianFactor() [1/2]
| gtsam::LinearizedJacobianFactor::LinearizedJacobianFactor | ( | ) |
default constructor for serialization
◆ LinearizedJacobianFactor() [2/2]
| gtsam::LinearizedJacobianFactor::LinearizedJacobianFactor | ( | const JacobianFactor::shared_ptr & | jacobian, |
| const Values & | lin_points | ||
| ) |
- Parameters
-
jacobian A jacobian factor lin_points The linearization points for, at least, the variables used by this factor
Member Function Documentation
◆ active()
|
inlinevirtualinherited |
Checks whether a factor should be used based on a set of values. This is primarily used to implement inequality constraints that require a variable active set. For all others, the default implementation returning true solves this problem.
In an inequality/bounding constraint, this active() returns true when the constraint is NOT fulfilled.
- Returns
- true if the constraint is active
Reimplemented in gtsam::BoundingConstraint2< VALUE1, VALUE2 >, gtsam::AntiFactor, and gtsam::BoundingConstraint1< VALUE >.
◆ begin() [1/2]
|
inlineinherited |
Iterator at beginning of involved variable keys
◆ begin() [2/2]
|
inlineinherited |
Iterator at beginning of involved variable keys
◆ clone()
|
inlineoverridevirtual |
- Returns
- a deep copy of this factor
Reimplemented from gtsam::NonlinearFactor.
◆ dim()
|
inlineoverridevirtual |
get the dimension of the factor (number of rows on linearization)
Implements gtsam::NonlinearFactor.
◆ end() [1/2]
|
inlineinherited |
Iterator at end of involved variable keys
◆ end() [2/2]
|
inlineinherited |
Iterator at end of involved variable keys
◆ equals()
|
overridevirtual |
equals function with optional tolerance
Reimplemented from gtsam::NonlinearFactor.
◆ error() [1/2]
|
overridevirtualinherited |
All factor types need to implement an error function. In factor graphs, this is the negative log-likelihood.
Reimplemented from gtsam::Factor.
◆ error() [2/2]
|
overridevirtual |
Calculate the error of the factor
Reimplemented from gtsam::NonlinearFactor.
◆ error_vector()
| Vector gtsam::LinearizedJacobianFactor::error_vector | ( | const Values & | c | ) | const |
(A*x-b)
◆ FromIterators()
|
inlinestaticprotectedinherited |
Construct factor from iterator keys. This is called internally from derived factor static factor methods, as a workaround for not being able to call the protected constructors above.
◆ FromKeys()
|
inlinestaticprotectedinherited |
Construct factor from container of keys. This is called internally from derived factor static factor methods, as a workaround for not being able to call the protected constructors above.
◆ keys()
|
inlineinherited |
- Returns
- keys involved in this factor
◆ linearize()
|
overridevirtual |
linearize to a GaussianFactor Reimplemented from NoiseModelFactor to directly copy out the matrices and only update the RHS b with an updated residual
Implements gtsam::NonlinearFactor.
◆ print()
|
overridevirtual |
print function
Reimplemented from gtsam::NonlinearFactor.
◆ rekey() [1/2]
|
virtualinherited |
Creates a shared_ptr clone of the factor with different keys using a map from old->new keys
Reimplemented in gtsam::LinearContainerFactor.
◆ rekey() [2/2]
|
virtualinherited |
Clones a factor and fully replaces its keys
- Parameters
-
new_keys is the full replacement set of keys
Reimplemented in gtsam::LinearContainerFactor.
◆ sendable()
|
inlinevirtualinherited |
Should the factor be evaluated in the same thread as the caller This is to enable factors that has shared states (like the Python GIL lock)
Reimplemented in gtsam::CustomFactor.
◆ size()
|
inlineinherited |
- Returns
- the number of variables involved in this factor
Member Data Documentation
◆ lin_points_
|
protectedinherited |
linearization points for error calculation
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/gtsam-jlblanco-docs/checkouts/latest/gtsam_unstable/nonlinear/LinearizedFactor.h
