#include <LinearizedFactor.h>
Public Types | |
| typedef NonlinearFactor | Base |
| typedef LinearizedGaussianFactor | This |
| typedef std::shared_ptr< LinearizedGaussianFactor > | shared_ptr |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. | |
Public Member Functions | |
| LinearizedGaussianFactor () | |
| LinearizedGaussianFactor (const GaussianFactor::shared_ptr &gaussian, const Values &lin_points) | |
| const Values & | linearizationPoint () const |
Testable | |
| void | print (const std::string &s="", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| virtual bool | equals (const NonlinearFactor &f, double tol=1e-9) const |
Testable | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality | |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys | |
Standard Interface | |
| virtual double | error (const Values &c) const |
| double | error (const HybridValues &c) const override |
| virtual size_t | dim () const =0 |
| virtual bool | active (const Values &) const |
| virtual std::shared_ptr< GaussianFactor > | linearize (const Values &c) const =0 |
| virtual shared_ptr | clone () const |
| virtual shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| virtual shared_ptr | rekey (const KeyVector &new_keys) const |
| virtual bool | sendable () const |
Standard Interface | |
| bool | empty () const |
| Whether the factor is empty (involves zero variables). | |
| Key | front () const |
| First key. | |
| Key | back () const |
| Last key. | |
| const_iterator | find (Key key) const |
| find | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
Advanced Interface | |
| KeyVector & | keys () |
| iterator | begin () |
| iterator | end () |
Static Protected Member Functions | |
Standard Constructors | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
Protected Attributes | |
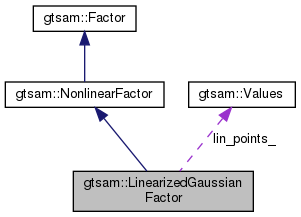
| Values | lin_points_ |
| KeyVector | keys_ |
| The keys involved in this factor. | |
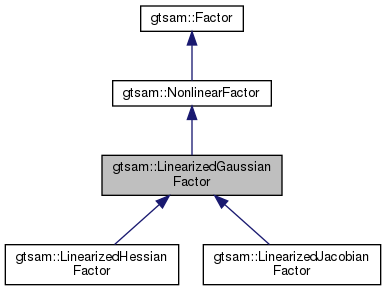
Detailed Description
A base factor class for the Jacobian and Hessian linearized factors
Member Typedef Documentation
◆ Base
base type
◆ shared_ptr
| typedef std::shared_ptr<LinearizedGaussianFactor> gtsam::LinearizedGaussianFactor::shared_ptr |
shared pointer for convenience
Constructor & Destructor Documentation
◆ LinearizedGaussianFactor() [1/2]
|
inline |
default constructor for serialization
◆ LinearizedGaussianFactor() [2/2]
| gtsam::LinearizedGaussianFactor::LinearizedGaussianFactor | ( | const GaussianFactor::shared_ptr & | gaussian, |
| const Values & | lin_points | ||
| ) |
- Parameters
-
gaussian A jacobian or hessian factor lin_points The linearization points for, at least, the variables used by this factor
Member Function Documentation
◆ active()
|
inlinevirtualinherited |
Checks whether a factor should be used based on a set of values. This is primarily used to implement inequality constraints that require a variable active set. For all others, the default implementation returning true solves this problem.
In an inequality/bounding constraint, this active() returns true when the constraint is NOT fulfilled.
- Returns
- true if the constraint is active
Reimplemented in gtsam::BoundingConstraint2< VALUE1, VALUE2 >, gtsam::AntiFactor, and gtsam::BoundingConstraint1< VALUE >.
◆ begin() [1/2]
|
inlineinherited |
Iterator at beginning of involved variable keys
◆ begin() [2/2]
|
inlineinherited |
Iterator at beginning of involved variable keys
◆ clone()
|
inlinevirtualinherited |
Creates a shared_ptr clone of the factor - needs to be specialized to allow for subclasses
By default, throws exception if subclass does not implement the function.
Reimplemented in gtsam::EssentialMatrixFactor4< CALIBRATION >, gtsam::NonlinearEquality2< T >, gtsam::CombinedImuFactor, gtsam::ImuFactor2, gtsam::EssentialMatrixFactor3, gtsam::NonlinearEquality1< VALUE >, gtsam::GeneralSFMFactor2< CALIBRATION >, gtsam::ImuFactor, gtsam::LinearizedHessianFactor, gtsam::PendulumFactorPk1, gtsam::FunctorizedFactor2< R, T1, T2 >, gtsam::MagFactor3, gtsam::Pose3AttitudeFactor, gtsam::SmartRangeFactor, gtsam::NonlinearEquality< VALUE >, gtsam::AHRSFactor, gtsam::EssentialMatrixFactor2, gtsam::ExpressionFactor< T >, gtsam::ExpressionFactor< BearingRange< A1, A2 > >, gtsam::ExpressionFactor< double >, gtsam::MagFactor2, gtsam::PendulumFactorPk, gtsam::GPSFactor2, gtsam::ProjectionFactorRollingShutter, gtsam::RangeFactorWithTransform< A1, A2, T >, gtsam::LinearContainerFactor, gtsam::LinearizedJacobianFactor, gtsam::Rot3AttitudeFactor, gtsam::MagFactor1, gtsam::GenericProjectionFactor< POSE, LANDMARK, CALIBRATION >, gtsam::DiscreteEulerPoincareHelicopter, gtsam::MultiProjectionFactor< POSE, LANDMARK, CALIBRATION >, gtsam::GeneralSFMFactor< CAMERA, LANDMARK >, gtsam::ProjectionFactorPPP< POSE, LANDMARK, CALIBRATION >, gtsam::TransformBtwRobotsUnaryFactorEM< VALUE >, gtsam::GenericStereoFactor< POSE, LANDMARK >, gtsam::TriangulationFactor< CAMERA >, gtsam::RotateDirectionsFactor, gtsam::PendulumFactor2, gtsam::ReferenceFrameFactor< POINT, TRANSFORM >, gtsam::FunctorizedFactor< R, T >, gtsam::PartialPriorFactor< VALUE >, gtsam::FunctorizedFactor< Vector, ParameterMatrix< M > >, gtsam::FunctorizedFactor< double, BASIS::Parameters >, gtsam::FunctorizedFactor< double, Vector >, gtsam::FunctorizedFactor< T, ParameterMatrix< traits< T >::dimension > >, gtsam::FunctorizedFactor< double, ParameterMatrix< P > >, gtsam::PartialPriorFactor< PoseRTV >, gtsam::MagPoseFactor< POSE >, gtsam::ProjectionFactorPPPC< POSE, LANDMARK, CALIBRATION >, gtsam::TransformBtwRobotsUnaryFactor< VALUE >, gtsam::BetweenFactor< VALUE >, gtsam::EssentialMatrixFactor, gtsam::VelocityConstraint, gtsam::PriorFactor< VALUE >, gtsam::GPSFactor, gtsam::PoseToPointFactor< POSE, POINT >, gtsam::BarometricFactor, gtsam::EssentialMatrixConstraint, gtsam::DummyFactor, gtsam::PoseBetweenFactor< POSE >, gtsam::BearingRangeFactor< A1, A2, B, R >, gtsam::PosePriorFactor< POSE >, gtsam::MagFactor, gtsam::PoseTranslationPrior< POSE >, gtsam::PoseRotationPrior< POSE >, gtsam::FullIMUFactor< POSE >, gtsam::AntiFactor, gtsam::RangeFactor< A1, A2, T >, gtsam::IMUFactor< POSE >, gtsam::RelativeElevationFactor, gtsam::PendulumFactor1, gtsam::Reconstruction, gtsam::RotateFactor, and gtsam::VelocityConstraint3.
◆ dim()
|
pure virtualinherited |
get the dimension of the factor (number of rows on linearization)
Implemented in gtsam::BetweenFactorEM< VALUE >, gtsam::TransformBtwRobotsUnaryFactorEM< VALUE >, gtsam::LinearizedHessianFactor, gtsam::NoiseModelFactor, gtsam::TransformBtwRobotsUnaryFactor< VALUE >, gtsam::SmartFactorBase< CAMERA >, gtsam::SmartFactorBase< PinholePose< CALIBRATION > >, gtsam::SmartFactorBase< StereoCamera >, gtsam::SmartFactorBase< PinholeCamera< Cal3Bundler > >, gtsam::LinearizedJacobianFactor, gtsam::WhiteNoiseFactor, gtsam::ShonanGaugeFactor, gtsam::LinearContainerFactor, gtsam::AntiFactor, gtsam::KarcherMeanFactor< T >, and gtsam::DummyFactor.
◆ end() [1/2]
|
inlineinherited |
Iterator at end of involved variable keys
◆ end() [2/2]
|
inlineinherited |
Iterator at end of involved variable keys
◆ equals()
|
virtualinherited |
Check if two factors are equal
Reimplemented in gtsam::CombinedImuFactor, gtsam::ImuFactor2, gtsam::GeneralSFMFactor2< CALIBRATION >, gtsam::NoiseModelFactor, gtsam::SmartProjectionPoseFactorRollingShutter< CAMERA >, gtsam::FunctorizedFactor2< R, T1, T2 >, gtsam::ImuFactor, gtsam::LinearizedHessianFactor, gtsam::InvDepthFactorVariant3b, gtsam::Pose3AttitudeFactor, gtsam::SmartProjectionRigFactor< CAMERA >, gtsam::SmartFactorBase< CAMERA >, gtsam::SmartFactorBase< PinholePose< CALIBRATION > >, gtsam::SmartFactorBase< StereoCamera >, gtsam::SmartFactorBase< PinholeCamera< Cal3Bundler > >, gtsam::AHRSFactor, gtsam::ProjectionFactorRollingShutter, gtsam::GPSFactor2, gtsam::EquivInertialNavFactor_GlobalVel_NoBias< POSE, VELOCITY >, gtsam::EquivInertialNavFactor_GlobalVel< POSE, VELOCITY, IMUBIAS >, gtsam::FrobeniusBetweenFactor< Rot >, gtsam::InertialNavFactor_GlobalVelocity< POSE, VELOCITY, IMUBIAS >, gtsam::SmartStereoProjectionFactorPP, gtsam::GenericProjectionFactor< POSE, LANDMARK, CALIBRATION >, gtsam::LinearizedJacobianFactor, gtsam::Rot3AttitudeFactor, gtsam::MultiProjectionFactor< POSE, LANDMARK, CALIBRATION >, gtsam::TransformBtwRobotsUnaryFactorEM< VALUE >, gtsam::NonlinearEquality< VALUE >, gtsam::GeneralSFMFactor< CAMERA, LANDMARK >, gtsam::SmartStereoProjectionPoseFactor, gtsam::SmartStereoProjectionFactor, gtsam::GenericStereoFactor< POSE, LANDMARK >, gtsam::ProjectionFactorPPP< POSE, LANDMARK, CALIBRATION >, gtsam::TriangulationFactor< CAMERA >, gtsam::SmartProjectionFactor< CAMERA >, gtsam::SmartProjectionFactor< PinholePose< CALIBRATION > >, gtsam::FunctorizedFactor< R, T >, gtsam::FunctorizedFactor< Vector, ParameterMatrix< M > >, gtsam::FunctorizedFactor< double, BASIS::Parameters >, gtsam::FunctorizedFactor< double, Vector >, gtsam::FunctorizedFactor< T, ParameterMatrix< traits< T >::dimension > >, gtsam::FunctorizedFactor< double, ParameterMatrix< P > >, gtsam::SmartProjectionPoseFactor< CALIBRATION >, gtsam::MagPoseFactor< POSE >, gtsam::ProjectionFactorPPPC< POSE, LANDMARK, CALIBRATION >, gtsam::PartialPriorFactor< VALUE >, gtsam::TransformBtwRobotsUnaryFactor< VALUE >, gtsam::PartialPriorFactor< PoseRTV >, gtsam::BetweenFactor< VALUE >, gtsam::BetweenFactorEM< VALUE >, gtsam::ExpressionFactor< T >, gtsam::ExpressionFactor< BearingRange< A1, A2 > >, gtsam::ExpressionFactor< double >, gtsam::PriorFactor< VALUE >, gtsam::SmartRangeFactor, gtsam::GaussMarkov1stOrderFactor< VALUE >, gtsam::PoseBetweenFactor< POSE >, gtsam::InvDepthFactor3< POSE, LANDMARK, INVDEPTH >, gtsam::GPSFactor, gtsam::InvDepthFactorVariant2, gtsam::OrientedPlane3DirectionPrior, gtsam::PoseTranslationPrior< POSE >, gtsam::InvDepthFactorVariant3a, gtsam::BarometricFactor, gtsam::EssentialMatrixConstraint, gtsam::InvDepthFactorVariant1, gtsam::PosePriorFactor< POSE >, gtsam::BiasedGPSFactor, gtsam::ShonanFactor< d >, gtsam::PoseRotationPrior< POSE >, gtsam::LinearContainerFactor, gtsam::AntiFactor, gtsam::FullIMUFactor< POSE >, gtsam::PoseToPointFactor< POSE, POINT >, gtsam::RelativeElevationFactor, gtsam::IMUFactor< POSE >, and gtsam::DummyFactor.
◆ error()
|
overridevirtualinherited |
All factor types need to implement an error function. In factor graphs, this is the negative log-likelihood.
Reimplemented from gtsam::Factor.
◆ FromIterators()
|
inlinestaticprotectedinherited |
Construct factor from iterator keys. This is called internally from derived factor static factor methods, as a workaround for not being able to call the protected constructors above.
◆ FromKeys()
|
inlinestaticprotectedinherited |
Construct factor from container of keys. This is called internally from derived factor static factor methods, as a workaround for not being able to call the protected constructors above.
◆ keys()
|
inlineinherited |
- Returns
- keys involved in this factor
◆ linearize()
|
pure virtualinherited |
linearize to a GaussianFactor
Implemented in gtsam::SmartProjectionPoseFactorRollingShutter< CAMERA >, gtsam::SmartProjectionRigFactor< CAMERA >, gtsam::SmartStereoProjectionFactor, gtsam::SmartProjectionFactor< CAMERA >, gtsam::SmartProjectionFactor< PinholePose< CALIBRATION > >, gtsam::NoiseModelFactor, gtsam::SmartStereoProjectionFactorPP, gtsam::LinearizedHessianFactor, gtsam::TransformBtwRobotsUnaryFactorEM< VALUE >, gtsam::NonlinearEquality< VALUE >, gtsam::WhiteNoiseFactor, gtsam::TriangulationFactor< CAMERA >, gtsam::LinearizedJacobianFactor, gtsam::TransformBtwRobotsUnaryFactor< VALUE >, gtsam::GeneralSFMFactor< CAMERA, LANDMARK >, gtsam::BetweenFactorEM< VALUE >, gtsam::ExpressionFactor< T >, gtsam::ExpressionFactor< BearingRange< A1, A2 > >, gtsam::ExpressionFactor< double >, gtsam::LinearContainerFactor, gtsam::ShonanGaugeFactor, gtsam::AntiFactor, gtsam::KarcherMeanFactor< T >, gtsam::DummyFactor, and gtsam::PinholeFactor.
◆ print()
|
overridevirtualinherited |
Reimplemented from gtsam::Factor.
Reimplemented in gtsam::EssentialMatrixFactor4< CALIBRATION >, gtsam::EssentialMatrixFactor3, gtsam::GeneralSFMFactor2< CALIBRATION >, gtsam::NoiseModelFactor, gtsam::LinearizedHessianFactor, gtsam::SmartProjectionPoseFactorRollingShutter< CAMERA >, gtsam::InvDepthFactorVariant3b, gtsam::SmartProjectionRigFactor< CAMERA >, gtsam::SmartFactorBase< CAMERA >, gtsam::SmartFactorBase< PinholePose< CALIBRATION > >, gtsam::SmartFactorBase< StereoCamera >, gtsam::SmartFactorBase< PinholeCamera< Cal3Bundler > >, gtsam::EssentialMatrixFactor2, gtsam::RangeFactorWithTransform< A1, A2, T >, gtsam::ProjectionFactorRollingShutter, gtsam::FrobeniusBetweenFactor< Rot >, gtsam::EquivInertialNavFactor_GlobalVel< POSE, VELOCITY, IMUBIAS >, gtsam::EquivInertialNavFactor_GlobalVel_NoBias< POSE, VELOCITY >, gtsam::SmartStereoProjectionFactorPP, gtsam::LinearizedJacobianFactor, gtsam::GenericProjectionFactor< POSE, LANDMARK, CALIBRATION >, gtsam::InertialNavFactor_GlobalVelocity< POSE, VELOCITY, IMUBIAS >, gtsam::SmartStereoProjectionPoseFactor, gtsam::WhiteNoiseFactor, gtsam::MultiProjectionFactor< POSE, LANDMARK, CALIBRATION >, gtsam::GeneralSFMFactor< CAMERA, LANDMARK >, gtsam::ReferenceFrameFactor< POINT, TRANSFORM >, gtsam::ProjectionFactorPPP< POSE, LANDMARK, CALIBRATION >, gtsam::SmartStereoProjectionFactor, gtsam::GenericStereoFactor< POSE, LANDMARK >, gtsam::TriangulationFactor< CAMERA >, gtsam::TransformBtwRobotsUnaryFactorEM< VALUE >, gtsam::SmartProjectionPoseFactor< CALIBRATION >, gtsam::SmartProjectionFactor< CAMERA >, gtsam::FunctorizedFactor< Vector, ParameterMatrix< M > >, gtsam::FunctorizedFactor< double, BASIS::Parameters >, gtsam::FunctorizedFactor< double, Vector >, gtsam::FunctorizedFactor< T, ParameterMatrix< traits< T >::dimension > >, gtsam::FunctorizedFactor< double, ParameterMatrix< P > >, gtsam::SmartProjectionFactor< PinholePose< CALIBRATION > >, gtsam::RotateDirectionsFactor, gtsam::VelocityConstraint, gtsam::ProjectionFactorPPPC< POSE, LANDMARK, CALIBRATION >, gtsam::PartialPriorFactor< VALUE >, gtsam::PartialPriorFactor< PoseRTV >, gtsam::BetweenFactor< VALUE >, gtsam::TransformBtwRobotsUnaryFactor< VALUE >, gtsam::BetweenFactorEM< VALUE >, gtsam::BearingRangeFactor< A1, A2, B, R >, gtsam::EssentialMatrixFactor, gtsam::PoseTranslationPrior< POSE >, gtsam::ExpressionFactor< BearingRange< A1, A2 > >, gtsam::ExpressionFactor< double >, gtsam::SmartRangeFactor, gtsam::PriorFactor< VALUE >, gtsam::GaussMarkov1stOrderFactor< VALUE >, gtsam::RangeFactor< A1, A2, T >, gtsam::OrientedPlane3DirectionPrior, gtsam::EssentialMatrixConstraint, gtsam::PoseRotationPrior< POSE >, gtsam::InvDepthFactor3< POSE, LANDMARK, INVDEPTH >, gtsam::InvDepthFactorVariant2, gtsam::InvDepthFactorVariant3a, gtsam::LocalOrientedPlane3Factor, gtsam::PoseBetweenFactor< POSE >, gtsam::InvDepthFactorVariant1, gtsam::FullIMUFactor< POSE >, gtsam::PosePriorFactor< POSE >, gtsam::ShonanFactor< d >, gtsam::RelativeElevationFactor, gtsam::IMUFactor< POSE >, gtsam::AntiFactor, gtsam::BiasedGPSFactor, gtsam::BearingFactor< A1, A2, T >, gtsam::PoseToPointFactor< POSE, POINT >, gtsam::RotateFactor, gtsam::OrientedPlane3Factor, and gtsam::DummyFactor.
◆ rekey() [1/2]
|
virtualinherited |
Creates a shared_ptr clone of the factor with different keys using a map from old->new keys
Reimplemented in gtsam::LinearContainerFactor.
◆ rekey() [2/2]
|
virtualinherited |
Clones a factor and fully replaces its keys
- Parameters
-
new_keys is the full replacement set of keys
Reimplemented in gtsam::LinearContainerFactor.
◆ sendable()
|
inlinevirtualinherited |
Should the factor be evaluated in the same thread as the caller This is to enable factors that has shared states (like the Python GIL lock)
Reimplemented in gtsam::CustomFactor.
◆ size()
|
inlineinherited |
- Returns
- the number of variables involved in this factor
Member Data Documentation
◆ lin_points_
|
protected |
linearization points for error calculation
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/gtsam-jlblanco-docs/checkouts/latest/gtsam_unstable/nonlinear/LinearizedFactor.h
