A dummy factor that allows a linear factor to act as a nonlinear factor. More...
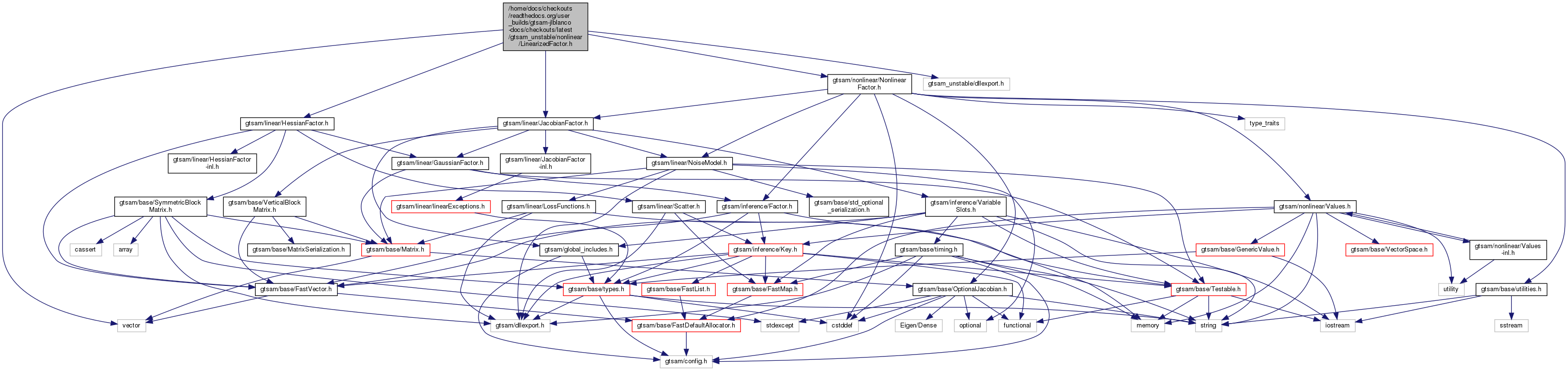
#include <vector>#include <gtsam_unstable/dllexport.h>#include <gtsam/nonlinear/NonlinearFactor.h>#include <gtsam/linear/JacobianFactor.h>#include <gtsam/linear/HessianFactor.h>
Include dependency graph for LinearizedFactor.h:
Go to the source code of this file.
Classes | |
| class | gtsam::LinearizedGaussianFactor |
| class | gtsam::LinearizedJacobianFactor |
| struct | gtsam::traits< LinearizedJacobianFactor > |
| traits More... | |
| class | gtsam::LinearizedHessianFactor |
| struct | gtsam::traits< LinearizedHessianFactor > |
| traits More... | |
Namespaces | |
| gtsam | |
Detailed Description
A dummy factor that allows a linear factor to act as a nonlinear factor.
