#include <NonlinearConjugateGradientOptimizer.h>
Public Types | |
| typedef NonlinearOptimizer | Base |
| typedef NonlinearOptimizerParams | Parameters |
| typedef std::shared_ptr< NonlinearConjugateGradientOptimizer > | shared_ptr |
Public Member Functions | |
| NonlinearConjugateGradientOptimizer (const NonlinearFactorGraph &graph, const Values &initialValues, const Parameters ¶ms=Parameters()) | |
| Constructor. | |
| ~NonlinearConjugateGradientOptimizer () override | |
| Destructor. | |
| GaussianFactorGraph::shared_ptr | iterate () override |
| const Values & | optimize () override |
Standard interface | |
| const Values & | optimizeSafely () |
| double | error () const |
| return error in current optimizer state | |
| size_t | iterations () const |
| return number of iterations in current optimizer state | |
| const Values & | values () const |
| return values in current optimizer state | |
| const NonlinearFactorGraph & | graph () const |
| return the graph with nonlinear factors | |
Advanced interface | |
| virtual VectorValues | solve (const GaussianFactorGraph &gfg, const NonlinearOptimizerParams ¶ms) const |
Protected Member Functions | |
| const NonlinearOptimizerParams & | _params () const override |
| void | defaultOptimize () |
Protected Attributes | |
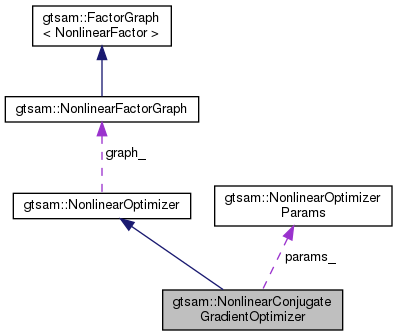
| Parameters | params_ |
| NonlinearFactorGraph | graph_ |
| The graph with nonlinear factors. | |
| std::unique_ptr< internal::NonlinearOptimizerState > | state_ |
| PIMPL'd state. | |
Detailed Description
An implementation of the nonlinear CG method using the template below
Member Function Documentation
◆ defaultOptimize()
|
protectedinherited |
A default implementation of the optimization loop, which calls iterate() until checkConvergence returns true.
◆ iterate()
|
overridevirtual |
Perform a single iteration, returning GaussianFactorGraph corresponding to the linearized factor graph.
Implements gtsam::NonlinearOptimizer.
◆ optimize()
|
overridevirtual |
Optimize for the maximum-likelihood estimate, returning a the optimized variable assignments.
Reimplemented from gtsam::NonlinearOptimizer.
◆ optimizeSafely()
|
inherited |
Optimize, but return empty result if any uncaught exception is thrown Intended for MATLAB. In C++, use above and catch exceptions. No message is printed: it is up to the caller to check the result
- Parameters
-
optimizer a non-linear optimizer
◆ solve()
|
virtualinherited |
Default function to do linear solve, i.e. optimize a GaussianFactorGraph
The documentation for this class was generated from the following file:
- /home/docs/checkouts/readthedocs.org/user_builds/gtsam-jlblanco-docs/checkouts/latest/gtsam/nonlinear/NonlinearConjugateGradientOptimizer.h
