Compute an interpolating basis. More...
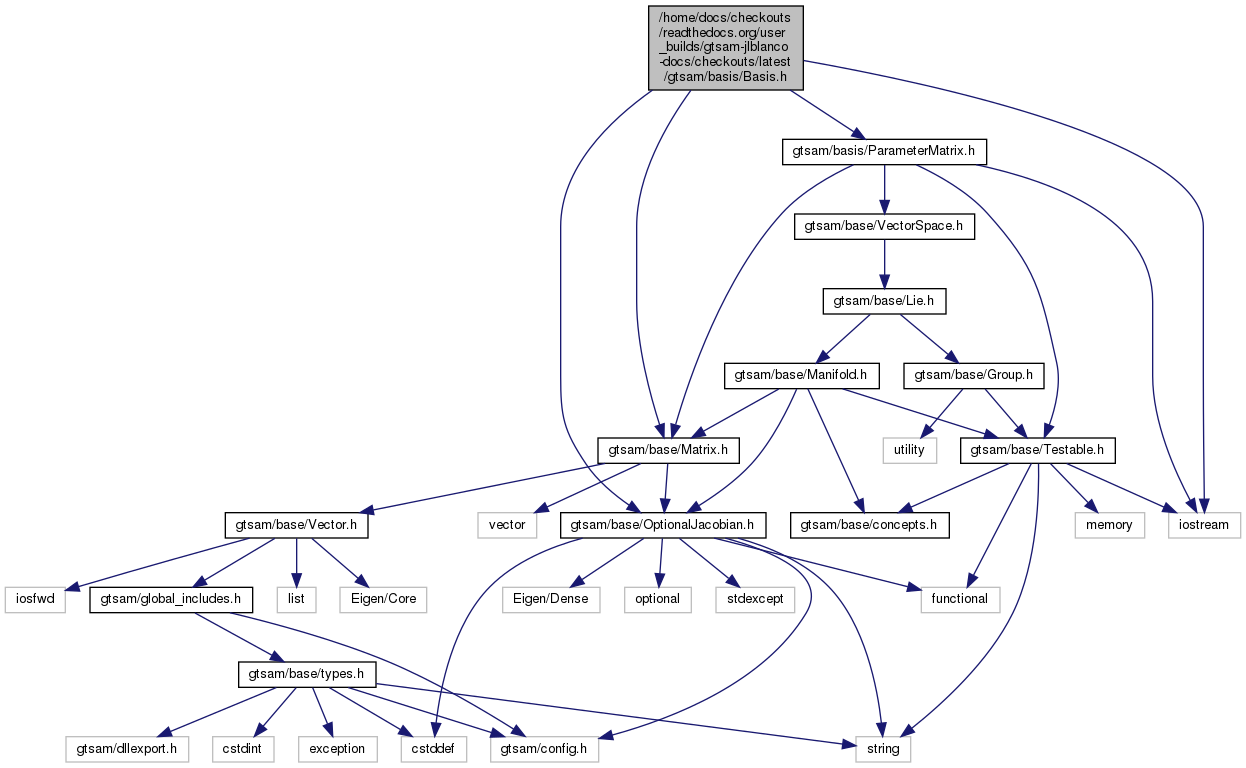
#include <gtsam/base/Matrix.h>#include <gtsam/base/OptionalJacobian.h>#include <gtsam/basis/ParameterMatrix.h>#include <iostream>
Include dependency graph for Basis.h:
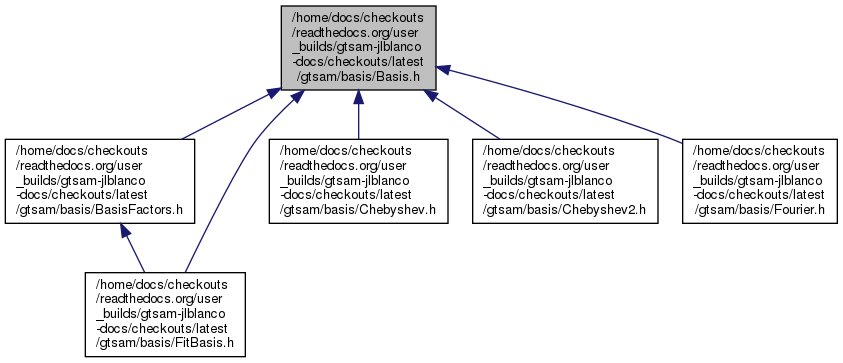
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::Basis< DERIVED > |
| class | gtsam::Basis< DERIVED >::EvaluationFunctor |
| class | gtsam::Basis< DERIVED >::VectorEvaluationFunctor< M > |
| class | gtsam::Basis< DERIVED >::VectorComponentFunctor< M > |
| class | gtsam::Basis< DERIVED >::ManifoldEvaluationFunctor< T > |
| class | gtsam::Basis< DERIVED >::DerivativeFunctorBase |
| Base class for functors below that calculate derivative weights. More... | |
| class | gtsam::Basis< DERIVED >::DerivativeFunctor |
| class | gtsam::Basis< DERIVED >::VectorDerivativeFunctor< M > |
| class | gtsam::Basis< DERIVED >::ComponentDerivativeFunctor< M > |
Namespaces | |
| gtsam | |
Typedefs | |
| using | gtsam::Weights = Eigen::Matrix< double, 1, -1 > |
Functions | |
| template<size_t M> | |
| Matrix | gtsam::kroneckerProductIdentity (const Weights &w) |
Function for computing the kronecker product of the 1*N Weight vector w with the MxM identity matrix I efficiently. The main reason for this is so we don't need to use Eigen's Unsupported library. More... | |
Detailed Description
Compute an interpolating basis.
- Date
- July 4, 2020
