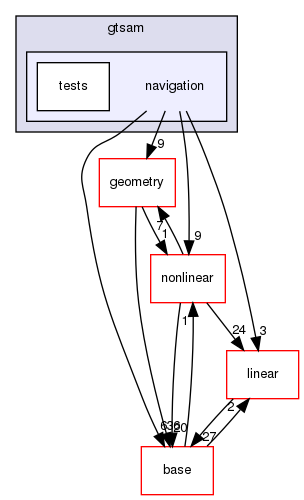
Directory dependency graph for navigation:
Directories |
Files | |
| file | AHRSFactor.h [code] |
| file | AttitudeFactor.h [code] |
| Header file for Attitude factor. | |
| file | BarometricFactor.h [code] |
| Header file for Barometric factor. | |
| file | CombinedImuFactor.h [code] |
| file | ConstantVelocityFactor.h [code] |
| Maintain a constant velocity motion model between two NavStates. | |
| file | GPSFactor.h [code] |
| Header file for GPS factor. | |
| file | ImuBias.h [code] |
| file | ImuFactor.h [code] |
| file | MagFactor.h [code] |
| Factors involving magnetometers. | |
| file | ManifoldPreintegration.h [code] |
| file | NavState.h [code] |
| Navigation state composing of attitude, position, and velocity. | |
| file | PreintegratedRotation.h [code] |
| file | PreintegrationBase.h [code] |
| file | PreintegrationParams.h [code] |
| file | Scenario.h [code] |
| Simple class to test navigation scenarios. | |
| file | ScenarioRunner.h [code] |
| Simple class to test navigation scenarios. | |
| file | TangentPreintegration.h [code] |
